Highlighted Projects
Key developments from my engineering portfolio. Full repository list available on GitHub. View all repositories →

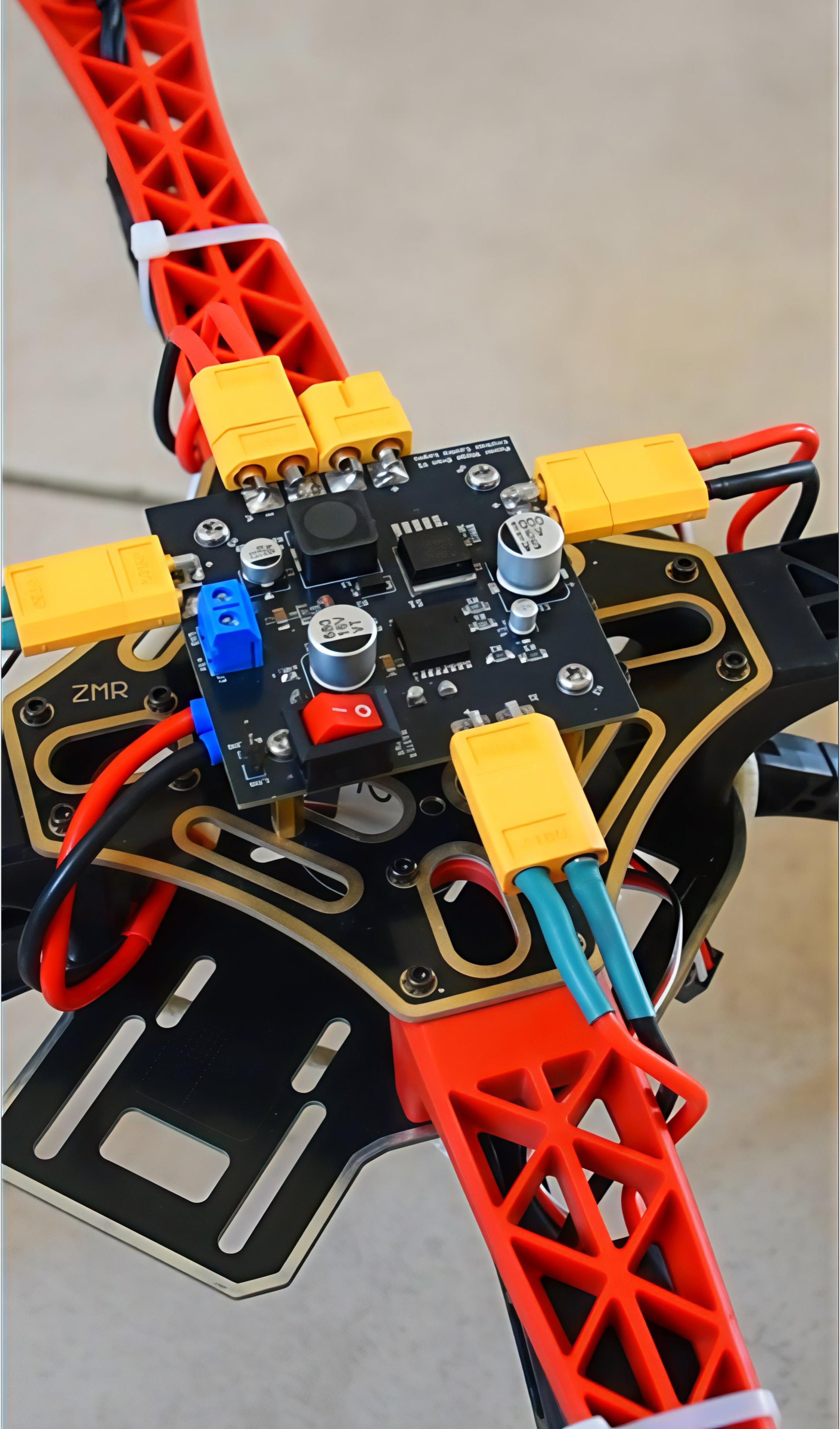
DIY UAV — Fly-by-Wire Testbed
Complete embedded flight-control platform with sensing, actuation and custom PCBs.
End-to-end UAV platform for real-time control experimentation and validation.
- Dual-IMU architecture with failover and fusion
- Real-time control loops and telemetry pipeline
- Custom KiCad PCBs for flight control and power stage
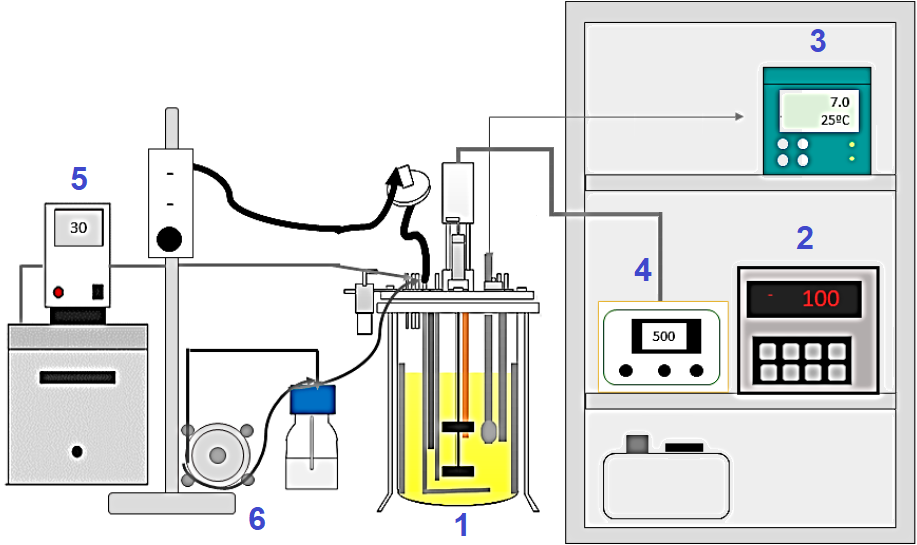
Temperature Control Module
Real-time process control with GUI and instrumentation.
Industrial-style thermal platform for control tuning and experimentation.
- Digital PID/PI controllers
- Live GUI + telemetry logging
- Closed-loop validation tests

Airwave Lab — BLE/Bluetooth RF Analysis
ESP32 and nRF24L01 platform for BLE/Bluetooth RF experimentation and spectrum measurements in controlled environments.
Educational wireless lab focused on protocol learning, passive RF observation and spectrum-based analysis.
- ESP32 + nRF24L01 experimental platform
- BLE/Bluetooth spectrum captures with PSD measurements
- Controlled-lab documentation with ethics and compliance focus
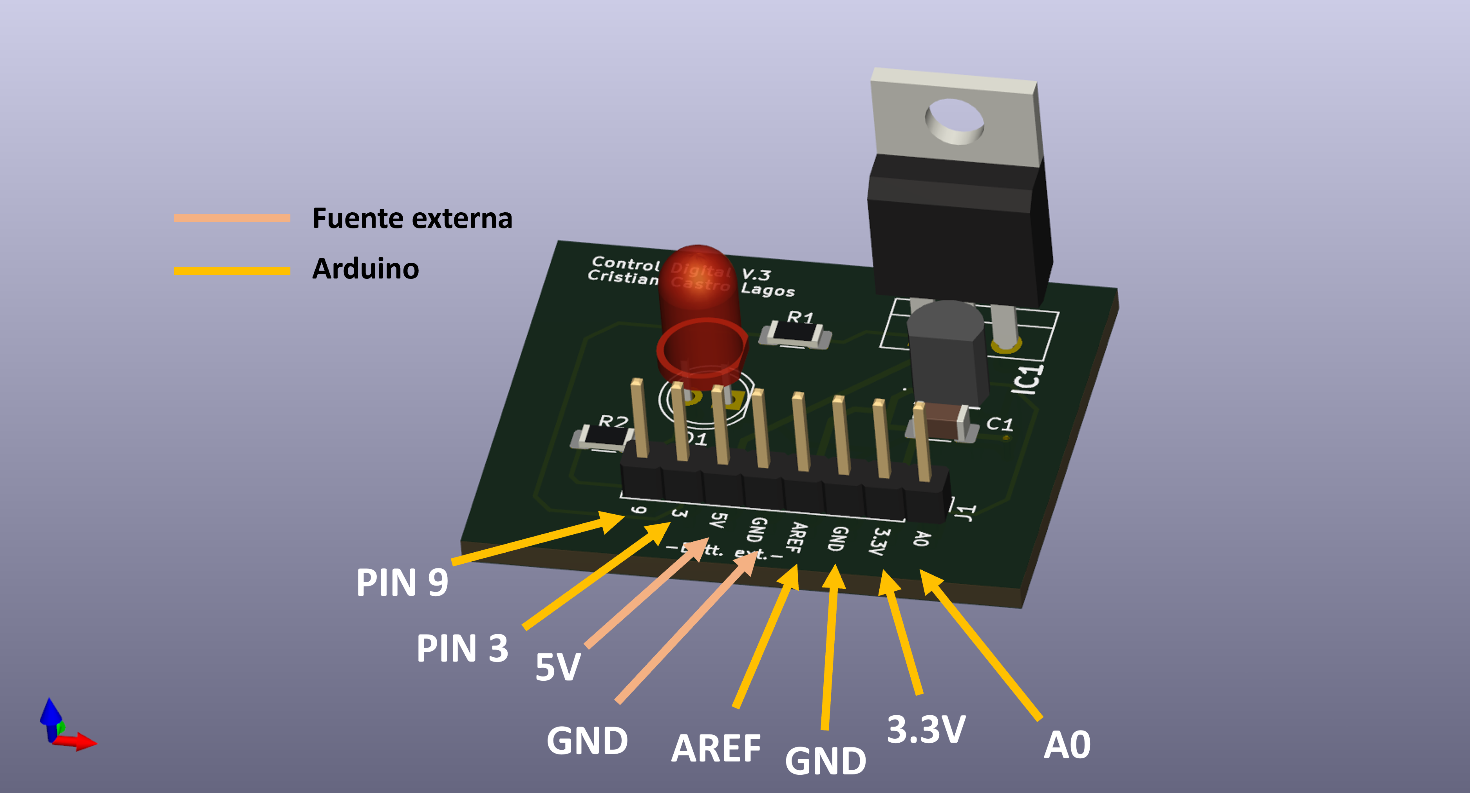
UAV Power Stage PCB
Custom power electronics and regulation board.
Reliable modular power architecture for UAV electronics.
- High-side smart switching protection
- Buck regulation for avionics
- EMI-aware PCB layout
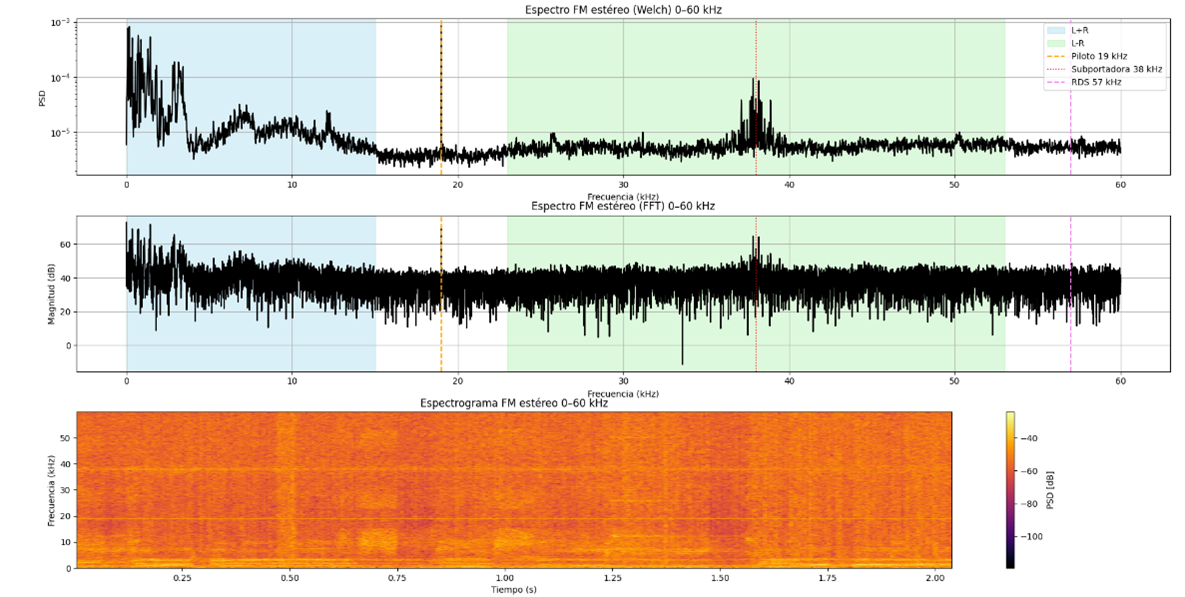
FM Spectrum Analysis with RTL-SDR
Python-based SDR pipeline for FM broadcast demodulation and stereo baseband analysis.
Hands-on signal processing workflow for IQ capture, FM demodulation and spectral interpretation using low-cost RTL-SDR hardware.
- RTL-SDR IQ acquisition and FM demodulation
- PSD (Welch), FFT and spectrogram analysis
- FM stereo multiplex and RDS component inspection
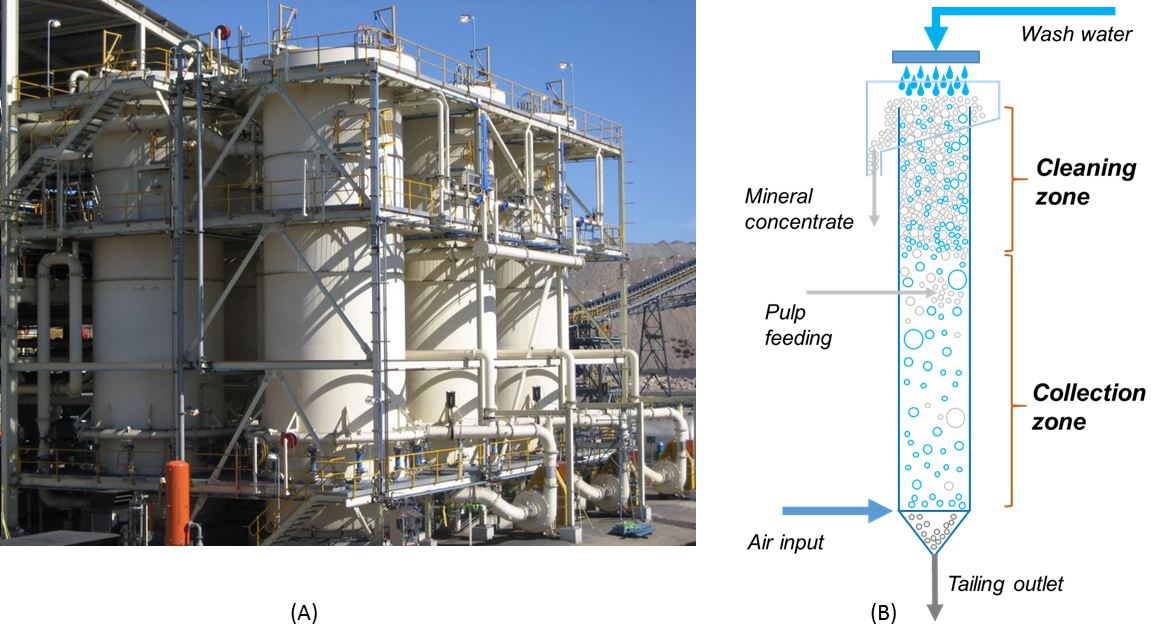
Flotation Column Control — LabVIEW HMI
Industrial SCADA-style interface and MIMO PID control.
Supervisory control system for pilot-scale mineral processing.
- Decoupled MIMO PID
- LabVIEW HMI
- Industrial DAQ integration
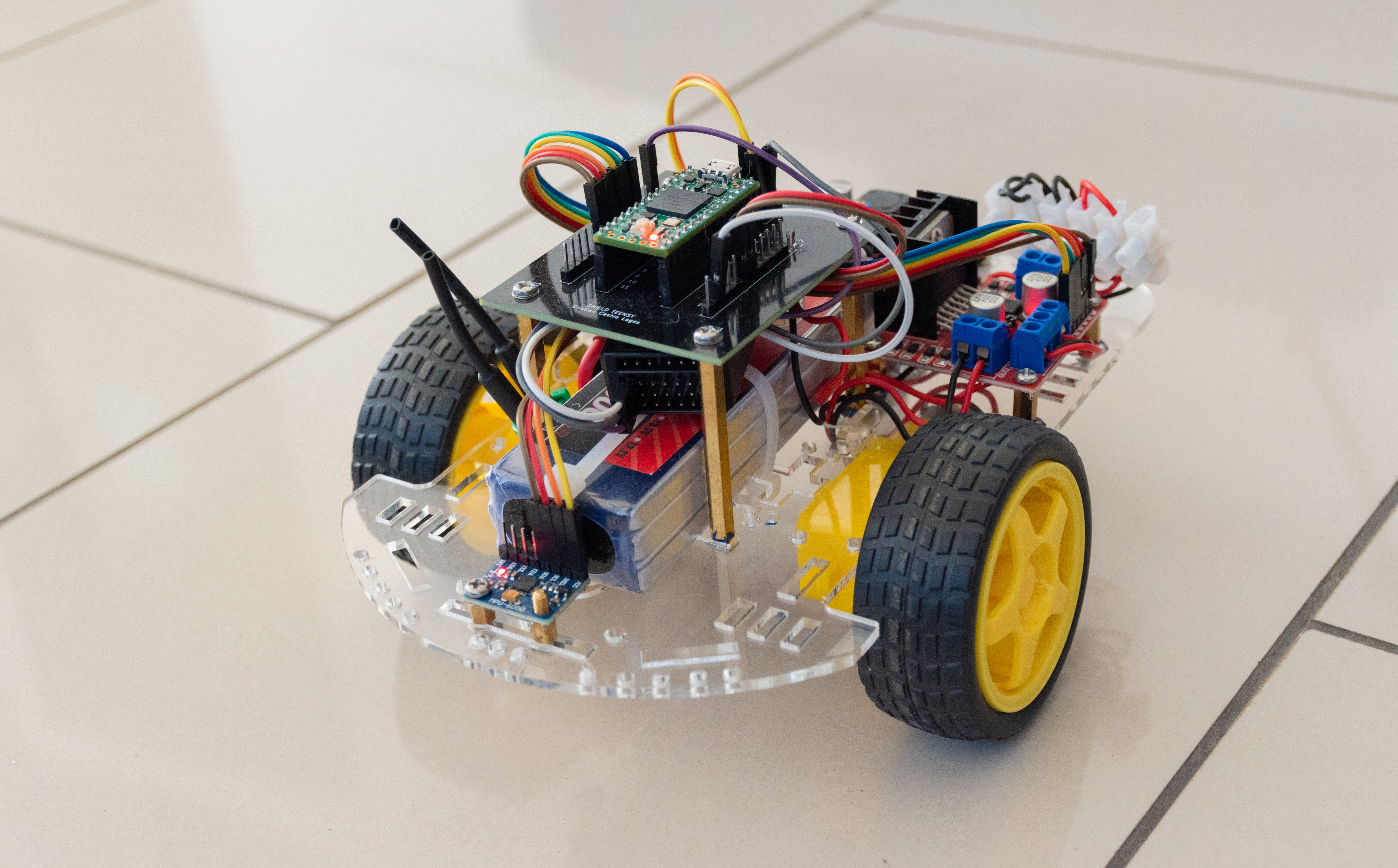
Robot Car — Drive-by-Wire Embedded Testbed
Embedded robotics platform integrating sensing, control and actuation for experiments.
Real-time mobile robotics testbed for control validation and sensor integration.
- Embedded control loops and actuator interfacing
- IMU/sensing integration and real-time telemetry
- Modular architecture for rapid experiments and upgrades
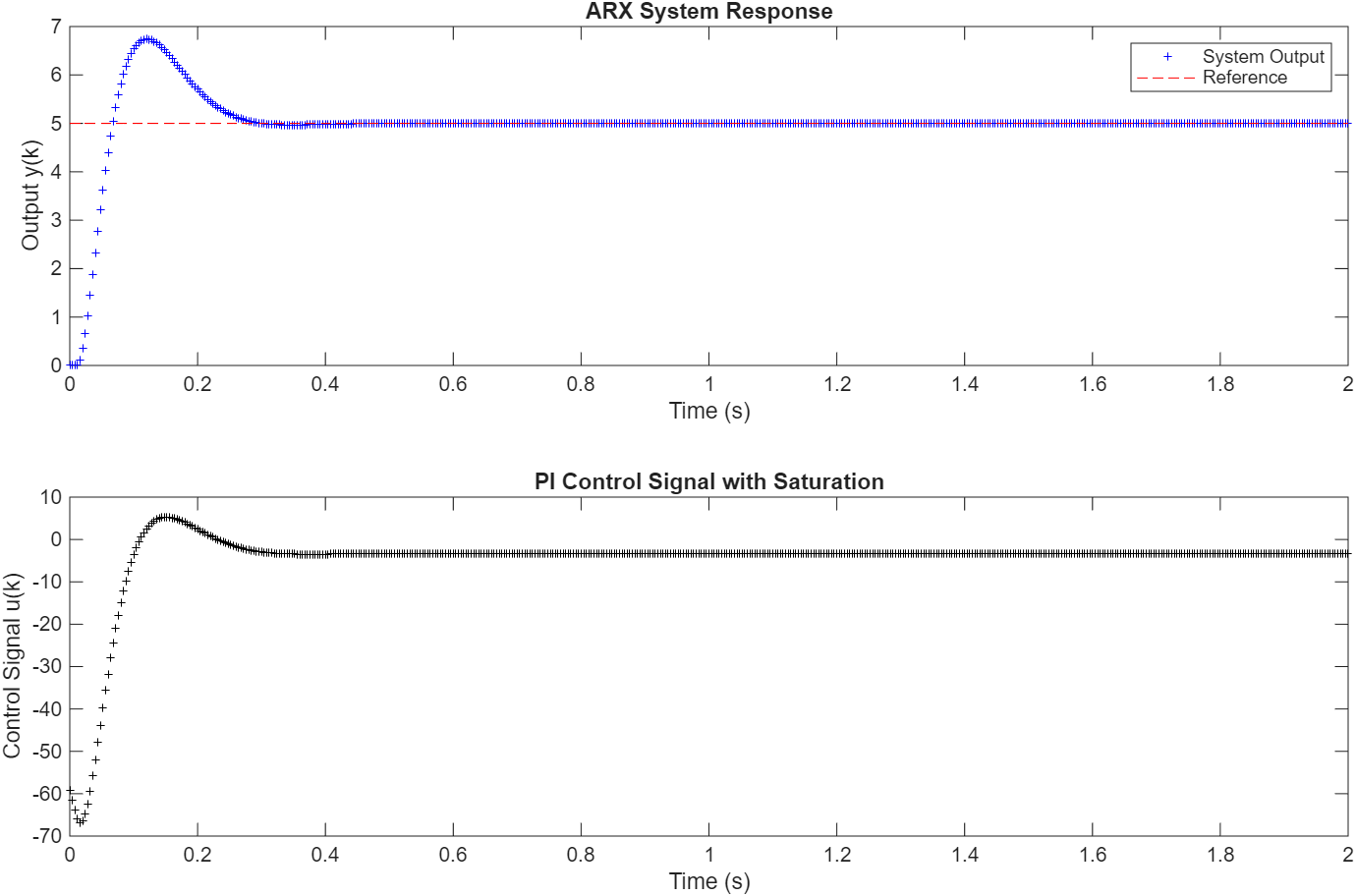
Digital Control & ARX Identification
System modeling and control design in MATLAB.
Data-driven workflow for plant identification and controller tuning.
- ARX/ARMAX modeling
- PI/PID tuning
- Simulation-to-experiment validation
Oxygen Transfer Control — Closed-Loop ID & PI
Industrial-style commissioning workflow: identification + PI tuning with real disturbances.
Control engineering case study showcasing data-driven tuning and on-plant validation practices.
- Closed-loop data collection and identification workflow
- PI tuning focused on robustness and operability
- Validation with disturbances and practical constraints
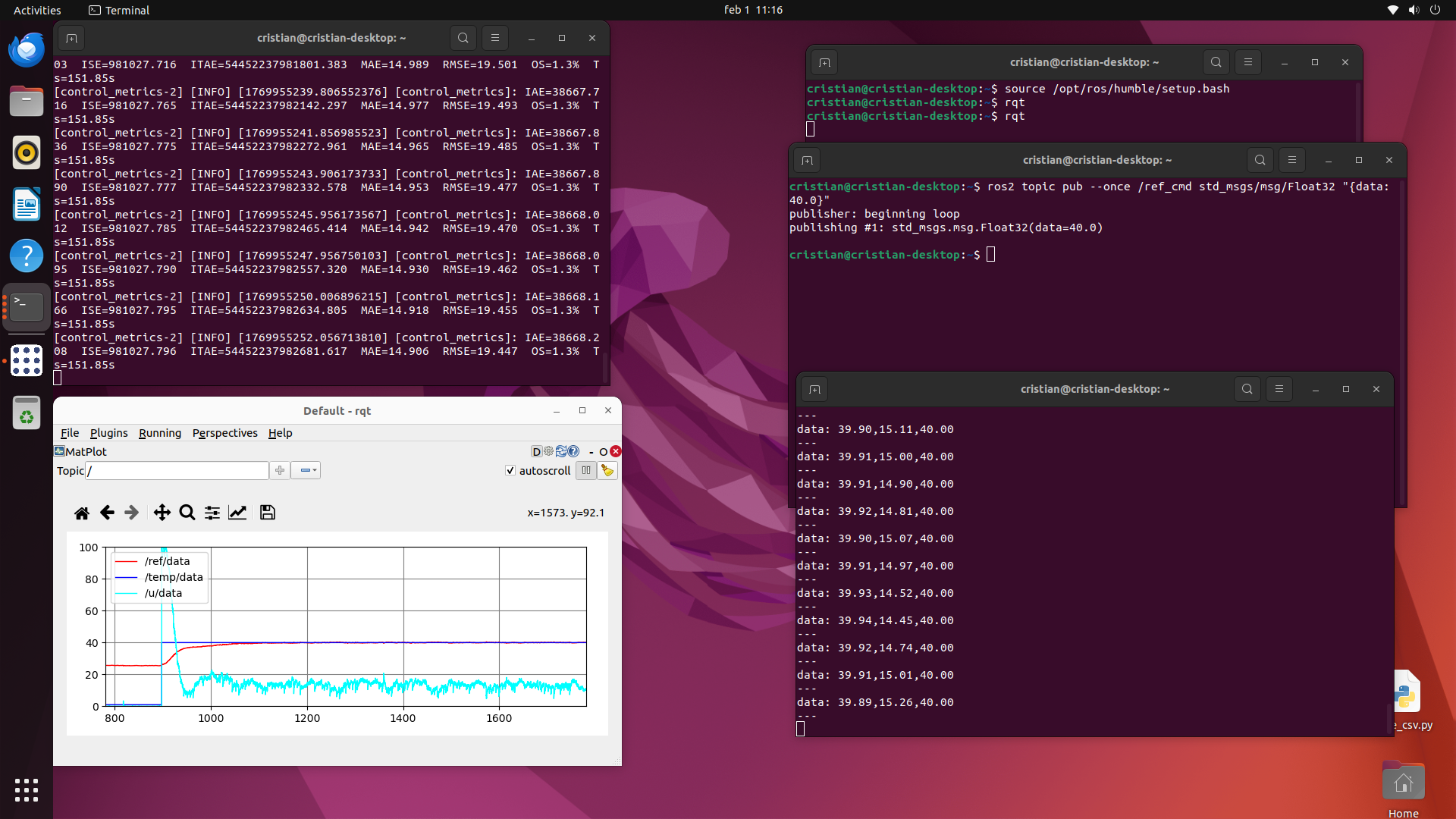
ROS 2 Humble Integration
Telemetry bridge using Raspberry Pi + ROS 2.
Embedded-to-ROS communication layer for robotics experiments.
- UART real-time bridge
- ROS 2 nodes for streaming and logging
- Field deployment on Raspberry Pi
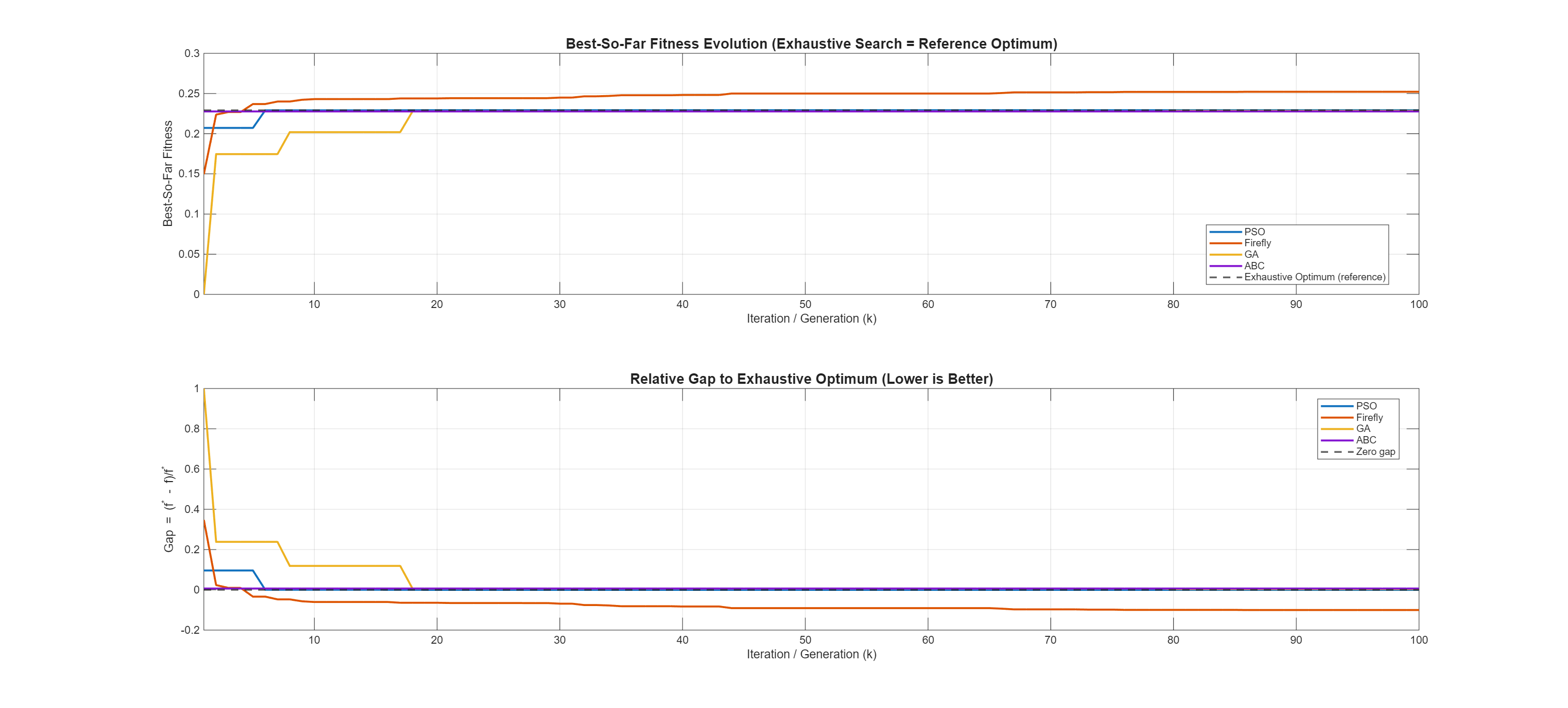
Metaheuristic Optimization for PI Control
Comparative evaluation of metaheuristic methods for PI controller tuning in a nonlinear tank system.
Engineering-oriented comparison of convergence behavior and computational efficiency using a reference exhaustive search.
- Exhaustive search used as reference optimum
- PSO, GA, Firefly and ABC comparison
- Fitness evolution and closed-loop performance analysis
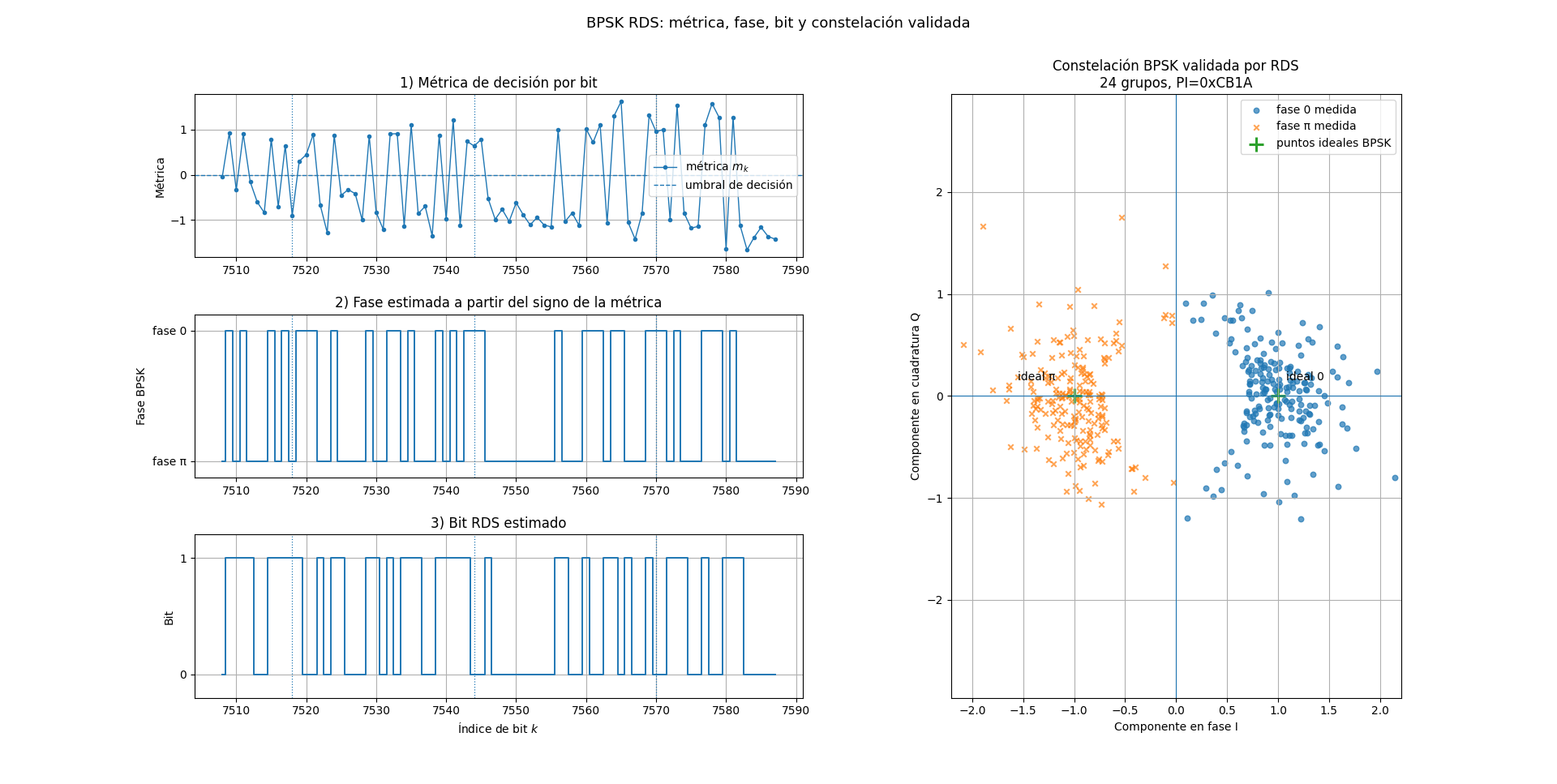
FM RDS BPSK Decoding with RTL-SDR
Python-based SDR pipeline for extracting and decoding RDS data from real FM broadcast captures.
Real-world DSP validation workflow for 57 kHz RDS extraction, BPSK recovery, block validation and RadioText reconstruction.
- RTL-SDR IQ capture and FM multiplex demodulation
- 57 kHz RDS extraction with BPSK/Costas-loop recovery
- PI, PS and RadioText reconstruction from real RDS groups